光伏电站经常面临使安装面临风险的危险,成为不可预测的经济投资。出于这个原因,单轴太阳能跟踪器的设计必须符合一系列考虑到风引起的气动弹性效应的参数。还需要改进电子设备以应对气旋、大风或电风暴等天气现象。
在本文档中,介绍了 RWDI 与 Soltec 合作为 SF7 单轴跟踪器进行的风研究结果,以及安全处理这些天气事件的功能。
1. DY-WIND 概述 2. DY-WIND:研究方法 2.1 运动跟踪方程:主要因素 2.2 跟踪器行为的精确建模 3. 静态和动态风荷载的比较 4. SF7 如何对抗极端天气条件?
1. DY-WIND 概述 通过与 Soltec 合作开发的混合实验-数值方法可以准确地估计多排阵列中在风作用下的跟踪器行为,并在设计过程中提供灵活性,而这通常无法通过完整的气动弹性模型测试来实现。
Matthew TL Browne, M.Eng., P.Eng., M.ASCE 项目经理 / 技术总监 / RWDI 助理
多项研究表明,应用于太阳能跟踪器的某些风设计规范标准不足以可靠地设计这些结构,因为它们没有考虑风对跟踪器的作用产生的二阶效应。 为了防止相关的结构不稳定问题,有必要找到新的分析方法,通过量化它们对风的二阶效应的响应来改进可靠跟踪器结构的设计。 风能顾问领导者 RWDI 与 Soltec 合作开发了一种创新方法 Dy-WIND,用于在跟踪器阵列风设计中进行综合动态分析。凭借 15 年的专业经验,Soltec 将这种方法融入了 Soltec 跟踪器的设计中。
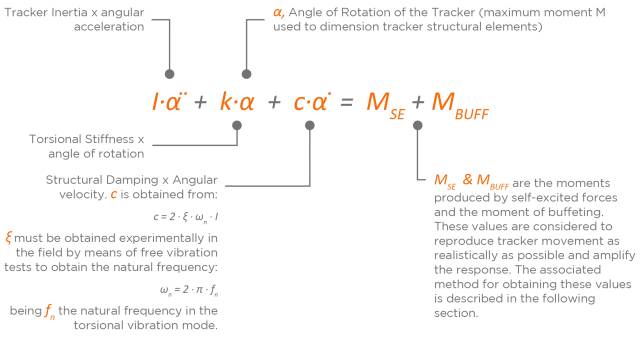
2. DY-WIND:研究方法 在设计太阳能跟踪器时,有几个因素会影响它们对风的动态影响的响应:
2.2 跟踪器行为的精确建模——动态效果 为了充分研究风对跟踪器结构的影响,必须考虑风的波动和湍流等几种现象。风荷载的波动部分是由于风的湍流和结构的动力响应。由共振引起的惯性载荷会显着增加波动的风载荷。
与 RWDI 合作开发的创新方法将风洞测试 结果与数值分析 相结合,以研究导致跟踪器振动或不稳定的主要机制的影响 。
机制1:共振
共振是由一般的风抖引起的,或者是由跟踪器场的上风行产生的湍流引起的尾流共振效应引起的。这种机制是用风洞压力数据研究的,负载放大是通过 使用风洞数据作为输入的动态放大因子(DAF)和抖振分析方法(BAM)的混合方法来解释的。
SOLTEC 与 Lynx Simulation 基于 Dy-WIND 方法进行的 CFD 模拟
机制2:扭转颤振
颤振是一种自激气动不稳定性,其气动力取决于结构本身的旋转和角速度,它会导致扭转运动或耦合扭转和垂直运动的振幅非常大。对于依靠从单个位置驱动的中央扭矩管的跟踪器,振动的扭曲模式是由通常在行端开始的颤振形式产生的。Torsional Flutter 表征高倾斜角行为。
SOLTEC 与 Lynx Simulation 基于 Dy-WIND 方法进行的 CFD 模拟
SOLTEC 与 Lynx Simulation 基于 Dy-WIND 方法进行的 CFD 模拟
机制3:扭转奔腾
这种不稳定性取决于结构的旋转,并且可能由于气动俯仰力矩的变化而导致结构中的大响应。在其开始时,增加的俯仰力矩会降低整体结构刚度,导致结构的单向扭曲或振荡运动,具体取决于结构的剩余刚度。随着风速的增加,一旦超过它们的阻力,这种不稳定性很可能会导致故障。这种不稳定性被称为“扭转奔腾”,其特征在于低倾斜角行为。
为了解决机制 2 和 3,实施了两个数值分析。
颤振分析方法 (FAM) 。
抖振分析法 (BAM) 。
为了进行这些数值分析,进行两种类型的风洞试验 至关重要。在风洞中获得的实验数据与数值方法相结合,得到每种方法(DAF-BAM、FAM & BAM) 。
1
传统的 风洞压力测试 使用刚性模型,可以预测每排的风力,同时考虑每排后面的气流尾迹。这用于确定动态放大因子 (DAF) 以覆盖设计风速范围以及所有风向。使用该模型的风速测量也需要作为多行阵列的 FAM 和 BAM 的输入。
2
风洞动态测试 使用 气动弹性截面模型来捕捉响应并进一步预测结构随时间和风速变化的行为。这用于确定 FAM 和 BAM 系数。
2.2.1 风洞压力和速度测试1 (刚性模型)+ DAF
静态风荷载系数是从风洞压力测试中获得的。这些系数不包括由共振振动或尾流引起的抖振引起的共振载荷。 动态放大系数 (DAF) 解释了由于这些效应导致的载荷放大,具体取决于结构系统的振动固有频率、风速、弦长以及系统中的阻尼。使用刚性模型作为 FAM 和 BAM 的输入,提供整个阵列速度的相对变化的风速测量也是必要的。
值得注意的是,这些系数基于使用刚性模型的风洞测试,因此它们不包括流固耦合效应(或气动弹性效应)。这些影响通过使用测得的风洞压力数据作为时域抖振分析的输入来解释。这种动态放大因子和抖振分析方法的混合方法允许在所有风速和风向上全面预测多排阵列上的负载。此方法表明,跟踪器字段中的前两行外部行受影响最大。在第二排之外,一排排的跟踪器具有遮蔽效果,内排的风力明显减小。
2.2.2 风洞动态测试2
为了研究与不稳定性相关的气动弹性效应, 必须解决 FAM 和 BAM 。执行这两种方法的第一步是从风洞动力学试验中获得气动导数,然后实施数值方法和模拟。
为此,以适当的比例对跟踪器的一部分进行建模,然后在为此目的设计的风洞中对其进行研究。通过实施弹簧悬挂系统并使用涡流阻尼,扭转刚度、惯性和阻尼系数被复制,允许模型旋转。
一旦在风洞中获得了空气动力学导数(刚度和阻尼),就开发了两种不同的数值模型,以实施 FAM 和 BAM 研究:
通过与 Soltec 合作开发的混合实验-数值方法可以准确地估计多排阵列中在风作用下的跟踪器行为,并在设计过程中提供灵活性,而这通常无法通过完整的气动弹性模型测试来实现。
Matthew TL Browne, M.Eng., P.Eng., M.ASCE 项目经理 / 技术总监 / RWDI 助理
2.2.3 颤振分析法(FAM)
分析跟踪器的稳定性以评估其对风的动态作用的响应。在设计跟踪器和预测它们的行为时,重要的是要考虑不稳定现象,例如扭转舞动和扭转颤动 。
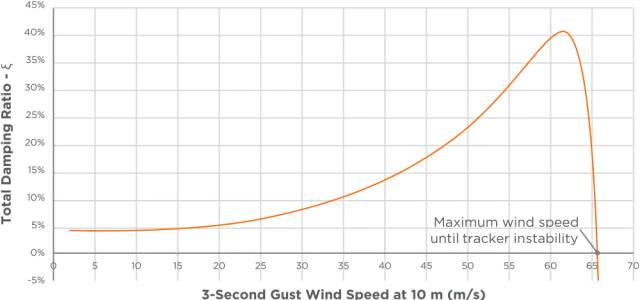
该分析的结果提供了总阻尼(结构 + 空气动力学)随风速的变化。不稳定性定义为总阻尼小于 0 的点。这项研究非常重要,因为它标志着跟踪器进入不稳定状态之前的临界风速。
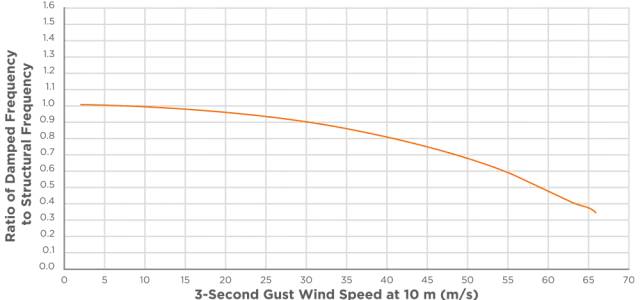
通过在跟踪器的不同倾斜角度应用风速测量,该方法可以应用于多排阵列,并显示系统的总扭转刚度(结构 + 空气动力学)如何随着风速的增加而降低。这种影响与自然频率的损失有关,因此随着风速在低倾斜角的情况下增加,跟踪器往往更容易受到风的抖振作用的影响。
FAM - 阻尼比与风速
FAM - 频率比与风速。扭转刚度损失 2.2.4 抖振分析法(BAM)
这种方法在太阳能跟踪器的设计计算中应该是强制性的,因为它是最好地预测多排跟踪器阵列在风作用下的行为的方法 ,同时在设计过程中提供灵活性,通常通过完整的气动弹性模型测试不实用。. 该方法既可以模拟全谱风湍流波动,也可以模拟由于抖振和自激力引起的跟踪器响应。动态强迫被结构运动放大,并且可能在风速低于空气动力学不稳定性的临界起始速度时产生结构问题。
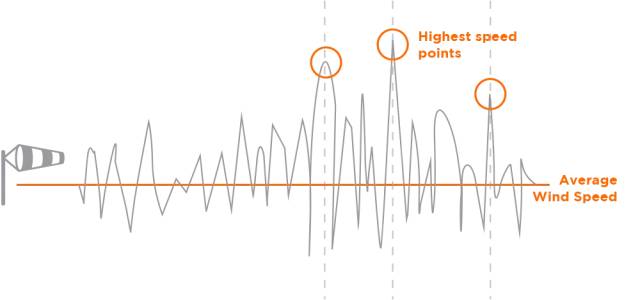
BAM 是考虑风峰波动全谱的推荐方法。这意味着最大力矩或最大跟踪器旋转将根据最大峰值风速计算,这代表最坏情况下的负载。这在不稳定发生之前接近最大允许风速的地区至关重要。
使用这种方法,可以在跟踪器的每个部件中分析由风作用引起的最大力矩和力,因此这些部件中的每一个的设计都比任何其他方法都更可靠。
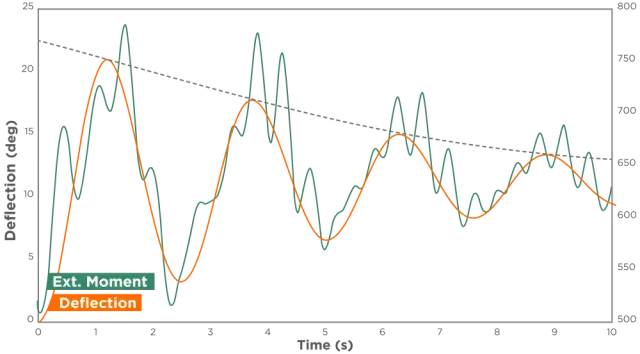
抖振分析导致跟踪器旋转的时间序列,这些响应可用于预测风引起的最大力矩响应,有效评估平均风载荷、风波动峰值、惯性载荷和自激力的综合影响. 如果系统中的总阻尼为负,则跟踪器的数值解将不稳定(超过颤振分析中给出的最大允许风速)。
稳定性响应(阻尼信号)
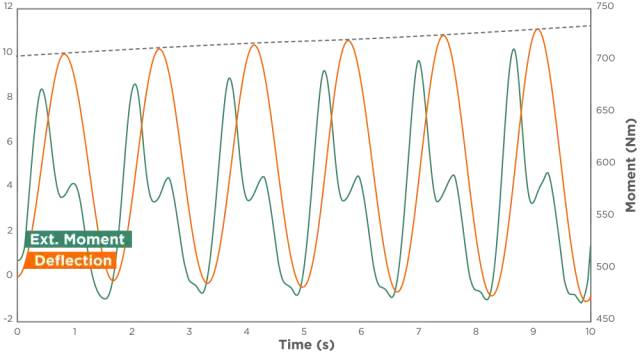
不稳定响应(预期结构性问题) 这些结果很大程度上取决于总跟踪器长度、弦长和扭转刚度,它们会影响跟踪器的固有频率。
一项相邻的研究测试了商业阻尼器的不同配置,以增加 c 阻尼系数。得出的结论是,阻尼器提供的额外阻尼不足以减轻太阳能跟踪器 (对于两个纵向组件配置)在低倾斜角下的扭转应力。没有商业阻尼器可以承受它所承受的拉应力和压应力。Soltec 承包了一项可以减轻这些影响的减震器的研究,但最终设计的成本高于完整的跟踪器,因此放弃了实施这样的系统。简单桩上的旋转衬套已经可以调节扭矩管摩擦应力,从而形成更坚固的抗扭转结构。
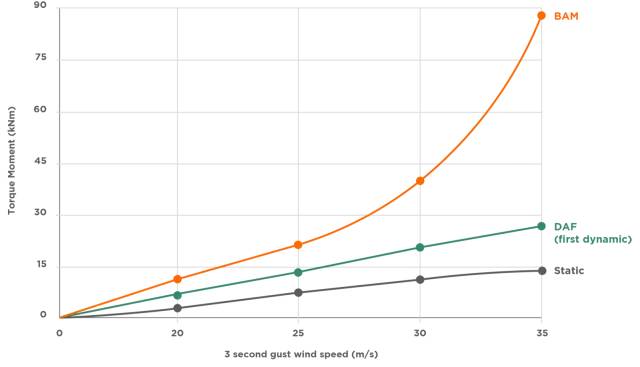
3. 静态和动态风荷载比较
风产生的主要影响是扭转力矩。该扭矩影响扭矩管和电机支撑组件。本文档中描述的动态效果显着增加了它。在下表中,根据 ASCE 7 和欧洲规范,在几种风速下会影响每个跟踪器组件的静态和动态力矩之间的比较。
静止的
达夫
震荡
Δ来自静态
20米/秒
4.8kNm
7.4 千牛米
11.8 千牛米
x2.45
25米/秒
7.5kNm
13.6 千牛米
22.1 千牛米
x 2.95
30米/秒
10.9 千牛米
20.4 千牛米
40.6 千牛米