强调
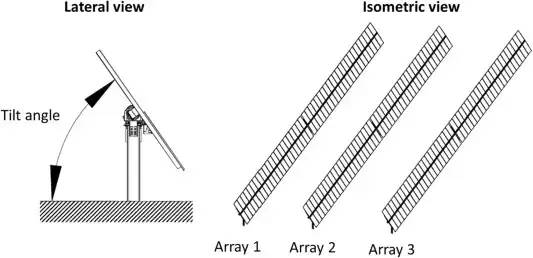
摘要由于世界各地制定的脱碳政策,太阳能装置每年都在增加。光伏 (PV) 系统,特别是单轴太阳能跟踪器是太阳能发电厂中最常用的安装类型。这些太阳能跟踪器是安装在露天区域的细长结构,有时会受到高速风的影响。在过去几年中,这些结构的故障开始出现,其中大多数与称为扭转舞动的动态现象有关。扭转舞动是一种气动弹性不稳定性,具有非常高的变形幅度,并且可以在太阳跟踪器的某些风速和倾斜角度下触发。 在本文中,进行了由于扭转舞动引起的太阳能跟踪器的故障调查。对破坏的结构进行了现场分析,建立了结构的数值模型。数值模型用于识别结构的固有频率以及太阳能跟踪器不同部分的最大应力。数值研究证实,失败的原因是高速风发生扭转舞动,并且太阳跟踪器的倾斜角为 0 度。 关键词太阳能、太阳能跟踪器、气动弹性 1 . 介绍在过去的几年里,世界上安装的太阳能量大幅增加。2019 年,全球新安装了约 114 吉瓦的光伏(PV)系统[1] 。大多数光伏装置都基于大型太阳能跟踪器阵列,它们在白天跟随太阳改变倾斜角度以最大限度地产生能量。有些跟踪器只能从东向西倾斜,反之亦然(单轴跟踪器),也可以从北向南倾斜,反之亦然(双轴跟踪器)。然而,安装最多的类型是单轴跟踪器,因为它们是更简单、更便宜的结构。这些太阳能跟踪器是安装在露天区域的平板式结构,有时风可以达到高速(见图 1 )。最近开始出现由高速风引起的太阳能跟踪器故障。
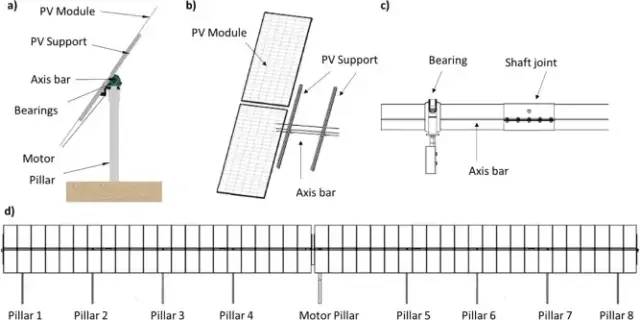
图 1。单轴太阳能跟踪器几何形状。 过去[2]、实验[3]、[4]和数值(在 2D [5]、[6]和 3D [7]、[8]中)研究了平板中风的影响。在这些研究中,详细研究了风对不同速度和平板倾斜角的静态和动态影响。风在太阳能电池阵列上引起的静力分解为阻力(平行于地面)和升力(垂直于地面),从而在支撑杆上产生扭矩。对于平板,由于倾斜角引起的扭矩变化是已知的[9] ,最小值在 0 度,两个拐点:第一个在 5-7 度左右,第二个在 40 度左右。然而,太阳能跟踪器结构设计中最具挑战性的一点是考虑风的动态影响。可能危及太阳能跟踪器结构健康的最重要的动态风机制是共振振动和扭转颤振或疾驰[10], [11]。 当太阳跟踪器以其固有频率被激发时,就会发生共振振动机制。它是由风抖或其他迎风跟踪器产生的湍流引起的。它也可能是由锁定现象引起的[12] ,其中涡旋脱落频率与结构的一个固有频率一致。在这些现象中,太阳能跟踪器的振动可能很高,但它们通常不是最大故障的原因,因为该结构相当灵活且可变形。 扭转颤振或舞动是自激空气动力学不稳定性,能够导致扭转运动的幅度非常大。由于这两种现象具有非常相似的性质,扭转颤振通常也耦合垂直运动,而扭转舞动是结构的单向扭转或取决于扭转刚度的振荡运动[11]. 振荡运动是在太阳跟踪器的第一个扭转固有频率下给出的,该频率通常处于低频(低于 3 Hz),因为这些结构非常大且细长。这些现象对结构完整性非常危险,因为它们是自激的,一旦发生,运动的幅度会随着条件的变化而逐渐增加。对于给定的太阳跟踪器,这些现象可以从一定的风速和倾斜角度开始。文献中解释了由于颤振或疾驰引起的不同故障,但并未专门针对太阳能跟踪器[13]、[14]、[15]、[16]。 在西班牙南部安装新的太阳能发电厂期间,发现其中一个太阳能跟踪器发生了灾难性的损坏。在发生故障的那一刻,太阳能跟踪器的倾斜度为 0 度,风速约为 60 公里/小时。有了这个倾斜角度,静态力几乎可以忽略不计,因此损坏的原因必须来自动态机制,比如我们的扭转舞动。在本文中,介绍并分析了该太阳能跟踪器中发现的损坏。数值模型已被用于确认损坏的起源,计算结构不同部分在承受大风荷载时的自然频率和应力。 2 . 太阳能跟踪器中的扭转舞动太阳能跟踪器类型结构的扭转运动由以下等式[17]定义: I0θ¨+2I0ξω0θ̇+kθ=M (1) 其中,I 0是扭转惯量,ω 0是固有扭转频率,ξ 是扭转阻尼,k 是扭转刚度,θ 是角位移变量。M 是气动扭矩,可以写成颤振导数的函数,用于研究扭转舞动[18]: M=12ρU2b3(KbUA2∗θ̇+K2A3∗θ) (2) 其中 K 是降低频率(降低速度的倒数),ρ 是空气密度,U 是空气速度,b 是特征长度,A 2 * 和 A 3 * 是颤振导数。这些颤振导数是空气动力学的并且是降低速度的函数。匹配方程。(1) , (2),如果阻尼为负,则所得微分方程将不稳定[19]: ξ-ρUb3KA2∗2Ioω0<0 (3) 与等式。(3) ,可以得到扭转舞动的临界速度。对于太阳跟踪器几何结构,A 2 * 取决于倾斜角,因此临界速度也取决于。因此,当 A 2 * 改变符号(从负变为正)时会发生不稳定性,并且这只发生在降低速度 (1/K) 的固定值时。因此,涉及太阳能跟踪器扭转舞动的主要变量是风速、倾斜角、跟踪器的尺寸特性及其扭转惯性和刚度。 3 . 损坏说明3.1 . 太阳能跟踪器说明本研究中分析的太阳能跟踪器是西班牙南部安达卢西亚太阳能发电厂的一部分。它是一个长 45 m 的长结构,由 90 个 PV 模块组成,这些 PV 模块带有一个 omega 型支撑到轴杆(见图2)。轴由 6 个不同的方形截面条组成,由四个不同的接头(见图2 c)连接并固定在电机上,电机负责根据太阳位置旋转光伏模块。轴杆由 8 个带轴承的不同支柱支撑,仅限制杆在垂直运动中(垂直于地面)。光伏组件由铝制框架构成,内部装有光伏材料。这些模块通过铝框固定在它们的支架上(见图2乙)。太阳跟踪器各部件的材料如表1所示。
图 2。太阳能跟踪器几何。a) 侧视图。b)光伏模块和支架的细节。c) 轴承和轴接头的细节。d) 太阳能跟踪器的前视图。
表 1。太阳能跟踪器每个组件的材料。
3.2 . 损坏的太阳能跟踪器大风天后,发现太阳能跟踪器完全损坏,如图 3 所示。可以看出,几乎一半的跟踪器从初始位置(0 度)旋转了大约 300 度。一些光伏组件丢失,而另一些则损坏。此外,支柱6、7和8(见图2 )完全弯曲。在图 4中,可以观察到支柱 5 附近的 PV 模块及其支架与轴杆分离。此外,可以看出,从马达柱到柱5的轴杆在与另一根杆的接合处完全变形。这是第一个表明太阳跟踪器受到高扭力的迹象。
图 3。损坏的太阳能跟踪器。
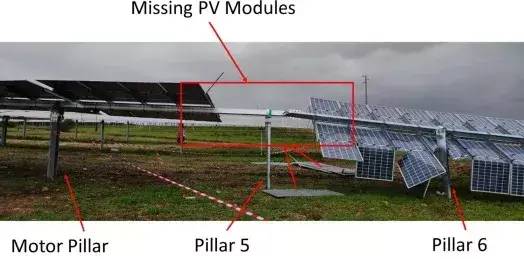
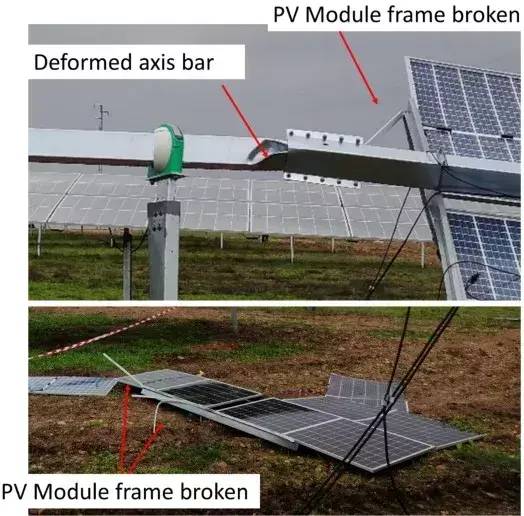
图 4。靠近支柱 5的光伏组件的细节。 更详细地观察光伏模块与其余部分分离的区域(图 5 ),可以观察到,在地面上发现的光伏模块中光伏材料完好无损,但它们的框架已损坏。这意味着它们受到了很大的力,能够弯曲这些模块的框架并将它们与其他模块分开。在同一张图片中,可以看到轴杆的变形是由于产生塑性变形的高扭力造成的。该杆的变形方式摒弃了任何因疲劳而失效的可能性,并指出了由于扭转舞动可能导致的失效。
图 5。变形的轴杆和损坏的光伏模块框架的细节。 其余仍与轴杆结合的光伏模块折叠或损坏,因为它们在轴的整个旋转过程中撞到地面。在图 6中可以观察到,只有一排 PV 模块在它们的支架和框架之间的连接处弯曲。此外,那些与柱子重合的模块由于与它们的碰撞而被完全摧毁。支柱呈现大的塑性变形。这张照片表明整个太阳能跟踪器在顺时针方向发生扭转变形(从图 6所示的尖端看轴杆)。
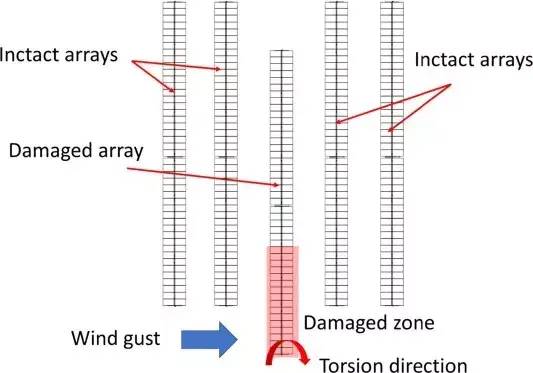
图 6。弯曲和损坏的光伏组件的细节。 3.3 . 损坏的假设原因损坏的太阳能跟踪器在太阳能电站中有特殊的配置(见图7)。在跟踪器的损坏部分,上游或下游没有任何其他太阳能跟踪器,这意味着该部分直接受到风的影响,在跟踪器之前或之后没有任何障碍物。这意味着该区域因风而产生的扭矩可能高于跟踪器的其余部分。考虑到这一事实并分析图 3至图 6 所示的损坏情况,损坏的可能原因可解释如下: 1. 根据从附近气象站获得的数据,太阳跟踪器受到了约 60 公里/小时的阵风的影响。 2. 由于前后没有障碍物,太阳能跟踪器的损坏部分直接受到阵风的影响。 3. 太阳跟踪器固定在 0 度倾斜,静态力最小,因此动态现象必须是造成如此大变形的原因。 4. 太阳跟踪器的变形具有扭转性质,这使得人们认为扭转舞动机制是造成这种损坏的原因。这种机制可能是由阵风或风湍流本身触发的。一旦触发这种现象,变形幅度就会放大,直到结构因塑性变形而破裂。 5. 发现有四个光伏组件与支柱 5 附近的轴分离,这导致人们认为它们承受了最大的扭转应力。此外,他们的框架被发现破损。 6. 这些模块附近的轴杆连接处完全变形,这意味着最大扭转应力也位于该区域。 7. 一旦这些模块由于高扭转应力而与轴杆分离,结构被分成两部分,可以进一步将扭转舞动效应集中在损坏部分。 8. 该结构旋转了 300 度,使支柱 6、7 和 8 变形,并使右排的光伏组件与地面发生碰撞。在与地面的碰撞中,那些光伏组件变形,与柱子重合的光伏组件被破坏。
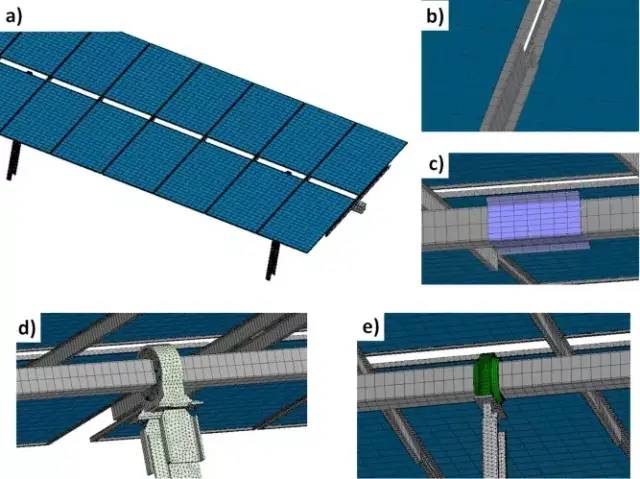
图 7。太阳能发电厂中损坏的太阳能跟踪器的处置。 因此,导致失败的假设事件顺序如下: 1. 大阵风作用在固定在 0 度倾斜的太阳跟踪器上。 2. 扭转舞动现象被触发,结构开始发生较大的扭转变形。 3. 靠近支柱 5 的光伏组件承受较大的支撑力,支撑断裂并与轴杆分离。 4. 扭转变形继续增加,直到整个结构旋转约 300 度与地面碰撞,使光伏组件和支柱 6、7、8 变形。 为了证实这一假设,建立了太阳能跟踪器的数值模型,并进行了包括模态分析和应力热点识别在内的数值研究。 4 . 数值研究4.1 . 有限元模型使用商业软件 Ansys v2020 [20]建立了 FEM 模型。使用的几何、网格和边界条件将在下一节中解释。 4.1.1 . 几何几何图形是根据草图构建的。它由整个太阳能阵列跟踪器组成,包括 9 个支柱、6 个轴杆、轴承、90 个光伏模块,包括它们的框架以及它们与轴杆的连接。 4.1.2 . 网格几何形状的每个部分都分别进行了网格划分,然后通过使用触点或连接点连接起来。六面体元件用于光伏模块和支撑杆,四面体元件用于支柱、轴承和框架,因为它们的几何形状更复杂。对模态分析的结果进行了网格敏感性分析。由于结果变化小于 1%,因此通过改变单元尺寸获得了最佳网格。最佳网格有大约 830.000 和 2.2·10 6 个元素。网格如图8所示。
图 8。网格细节。a) 光伏组件。b) PV 模块与其框架之间的连接处。c) 轴杆之间的连接点。d) 电机支柱。e) 轴承细节。 4.1.3 . 边界条件用于模拟的材料特性是对应于表 1中所列材料的标准。根据[21]中的参考数据,光伏组件的杨氏模量、泊松比和密度分别设置为 E = 2.1e9 Pa、υ = 0.4 和 ρ = 1370 kg/m 3。 柱子在其底部以非位移状态固定。在 PV 模块及其支撑条和框架之间,以及在轴条和它们的连接处之间定义了键合触点。轴承被定义为旋转接头,它只允许轴杆和支柱之间的角位移。电机柱通过键合触点固定在轴杆上,这是太阳能跟踪器固定在一定倾斜角度时的正常情况。 4.2 . 模态分析首先,进行模态分析以确定太阳跟踪器的固有频率和模态形状。找到的固有频率总结在表 2中,它们相应的振型可以在图 9中看到。模态形状分为弯曲模态 (B) 和扭转模态 (T)。在低频下仅发现一种弯曲模式,而在 0-5 Hz 范围内获得了几种扭转模式。当频率增加时,扭转模态出现更多的节线。如介绍部分所述,第一扭转模式 (T1) 是扭转驰骋期间通常被激发的模式。 表 2。太阳跟踪器的自然频率值。
图 9。太阳跟踪器的模态形状。归一化位移(红色最大值,蓝色最小值)。 4.3 . 应力分析进行了应力分析,以找出当结构承受风引起的高载荷时结构中最大应力的位置。如图10所示,在结构的旋转轴上施加力矩。根据[22],风速为 60 km/h 时,该扭矩的幅度设置为 10 kNm。
     |